
產品描述
型號參數
資料下載
產品描述
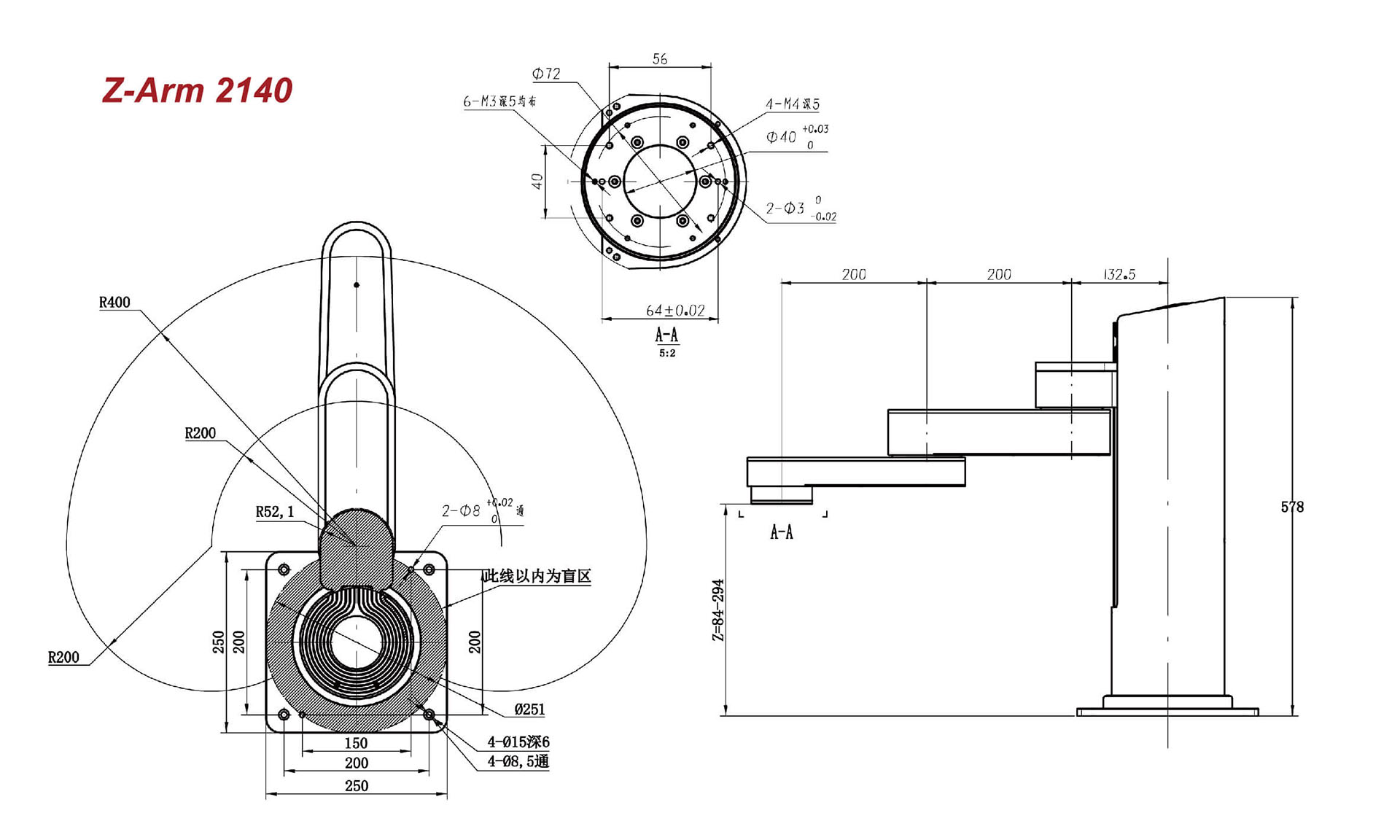
Z-Arm 2410 核心參數
| ±0.03mm | 3Kg |
| 重復定位精度 | 最大負載 |
| 400mm | 210mm |
| 臂長(1軸 + 2?軸) | Z?軸行程 |
| *范圍尺寸圖 |
 |
產品亮點
增強的負載能力
與之前的產品相比,Z-Arm 2140的有效負載能力提高了2倍,達到3KG。它將是物料搬運和裝配任務的最佳競助力。
安全穩定
作為臺式協作機器人,Hitbot Z-Arm 2140在通過碰撞檢測確保安全性以及通過以1255.45mm / s(1.5KG有效載荷)的快速移動和±0.03mm的可靠重復性來提高生產率。
智能編程
Hitbot Z-Arm 2140主要可以通過兩種方法輕松設置。用戶可以使用自行開發的一站式應用程序HitbotStudio,也可以手動拖放協作機器人本身來實現機器教學。兩者僅需約20分鐘。
開源硬件
Hitbot Z-Arm 2140是一種開源硬件協作機器人,可以由客戶自己根據特定要求進行定制。支持的編程語言包括V-rep,Ros,Matlab,Java,Paython等。
各種可選套件
借助各種可選的最終工具套件,例如電動夾具,第五軸套件和Wi-Fi模塊,用戶可以在工作臺上創建無限的未來生產應用場景。
靈活的應用
Z-Arm 2140是電子,食品和飲料,機械,太陽能,制藥,醫療和研究領域等眾多行業的理想選擇。
接口面板使用功能
A處底座接口示意圖
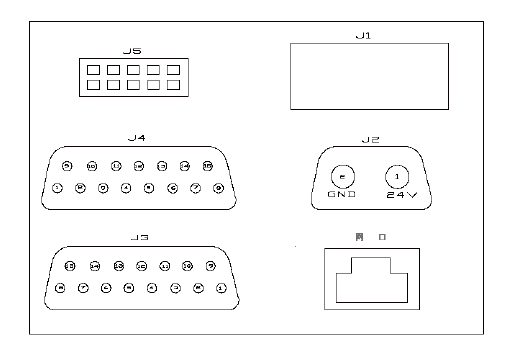
圖1
圖1接口定義說明
① J1為電源開關接口,用于控制電源通斷。
② J2為電源輸入口,24V直流電壓源輸入。
③ J3為IO輸出口,內部9組光耦隔離NPN輸出。
④ J4為用戶IO輸入口,內部9組光耦隔離輸入。
⑤ J5為WIFI擴展口,配合本公司開發的WIFI模塊用于手臂IP地址。
B處IO接口面板總示意圖
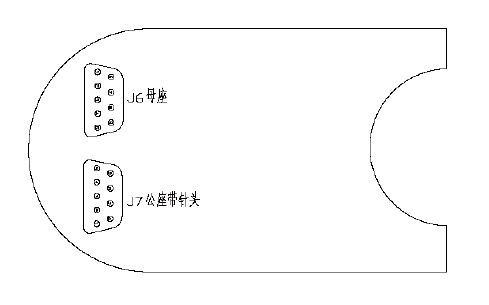
圖2
圖2接口定義說明
⑥ J6為IO輸入輸出口,機械臂末端提供給用戶簡單IO控制
⑦ J7為控制電動夾爪接口,機械臂末端提供給用戶控制電動夾爪、3D打印、第五軸套件。
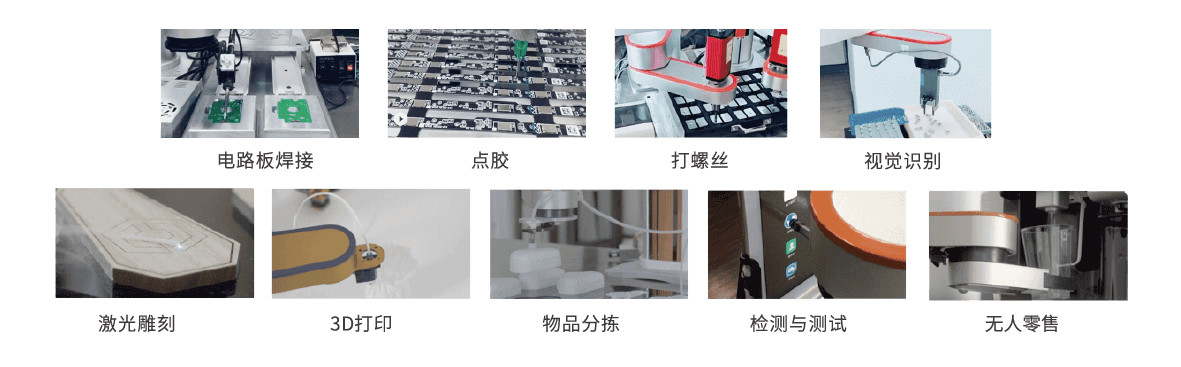
應用場景
型號參數
| 產品型號 | Z-Arm 2140 | |
| 編程軟件 | HitbotStudio | |
| 軸數 | 4 | |
| 額定負載 | 2KG | |
| 最大負載 | 3KG | |
| 最大臂展 | 400mm | |
| 一軸臂展 | 200mm | |
| 二軸臂展 | 200mm | |
| 一軸旋轉范圍 | ±90° | |
| 二軸旋轉范圍 | ±164° | |
| Z軸行程 | 210mm | |
| 重復定位精度 | ±0.03mm | |
| 連接方式 | Wi-Fi/Ethernet | |
| I/O接口 | 數字量輸入(隔離):5 | 數字量輸出(隔離):5 |
| 碰撞檢測 | 支持 | |
| 拖動示教 | 支持 | |
資料下載

