


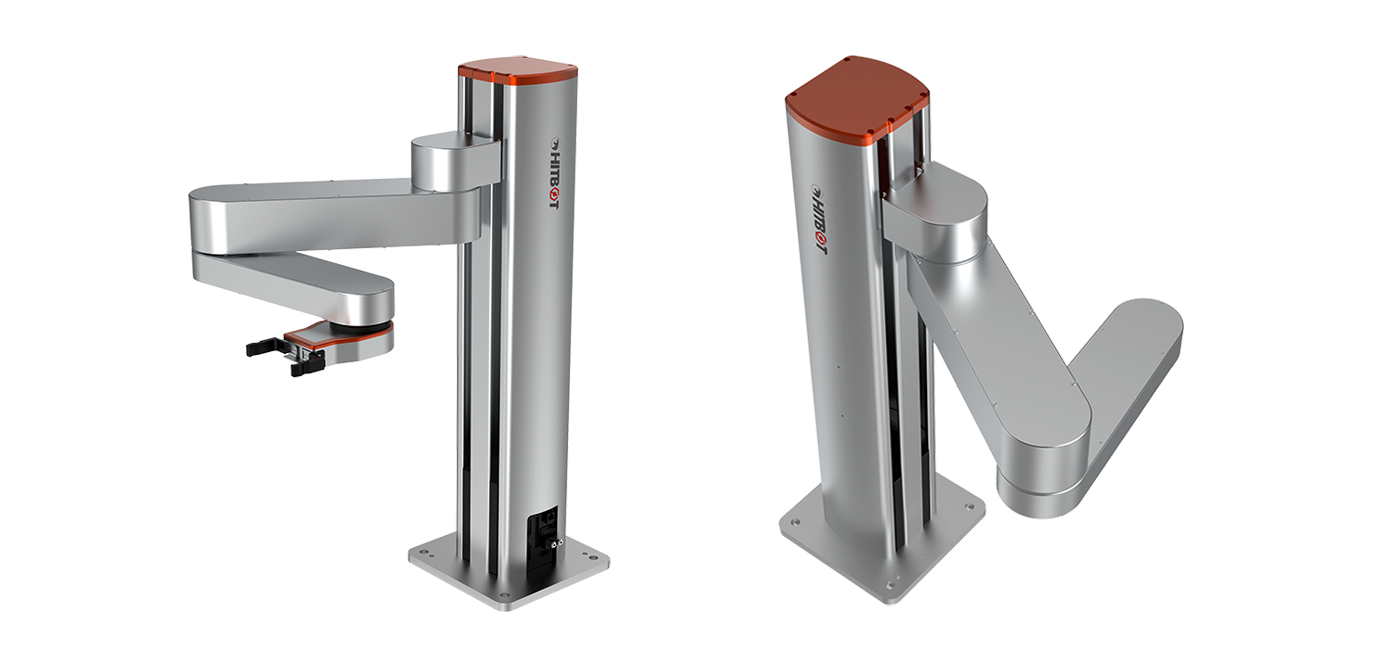

| 產品圖片 |  |
 |
 |
 |
||
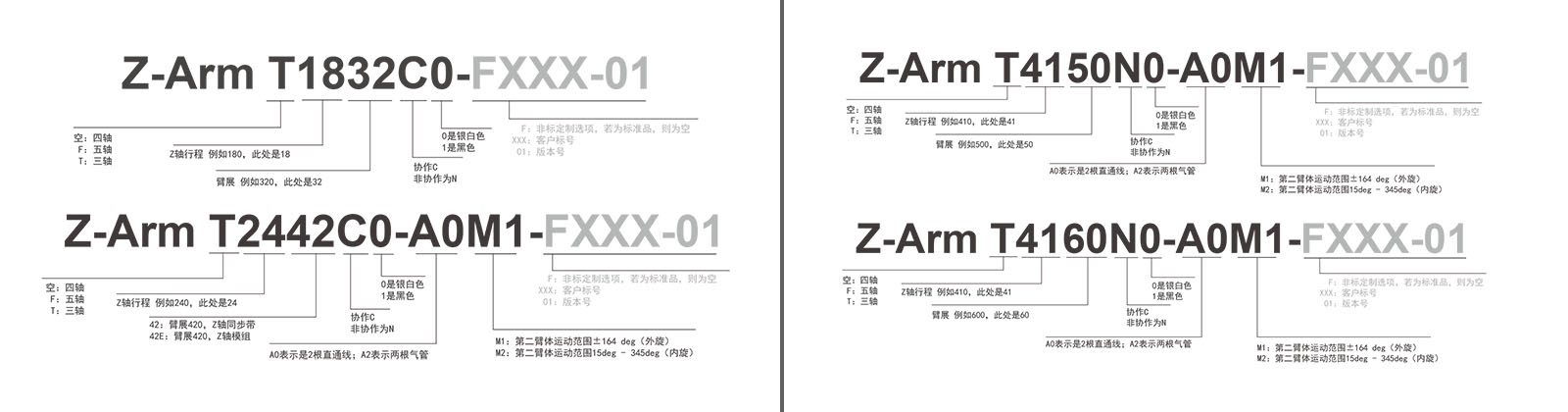
| 四軸協作機械臂 | Z-Arm XX32 | Z-Arm XX42 | Z-Arm XX60 | Z-Arm XX50 | ||
| 基本信息 | 1 軸 | 臂長 | 160mm | 220mm | 325mm | 275mm |
| 旋轉角度 | ± 90° | |||||
| 2 軸 | 臂長 | 160mm | 200mm | 275mm | 225mm | |
| 旋轉角度 | ± 143° | ± 164° | ± 164° | ± 164° | ||
| Z 軸 | 行程 | 180mm (高度可定制) | 240mm (高度可定制) | 410mm (高度可定制) | 410mm | |
| R 軸 | 旋轉范圍 | ± 1080° | ±1080° 無機械限位 /±170° 有機械限位 | ±1080° 無機械限位/ ±170° 有機械限位 | ±1080° 無機械限位 / ±170° 有機械限位 | |
| 線速度 | 1017mm/s (負載 0.5kg) | 1255.45mm/s (負載1.5kg); 1220mm/s (負載 2kg); | 1500mm/s (負載 3Kg) | 1400mm/s (負載4kg) | ||
| 重復定位精度 | ± 0.02mm | ± 0.03mm | ± 0.05mm | ± 0.05mm | ||
| 標準負載 | 0.5kg | 2kg | 3kg | 4kg | ||
| 最大負載 | 1kg | 3kg | 3.5kg | 5 kg | ||
| 自由度 | 4 | |||||
| 電源 | 220V/110V 50-60Hz 適配至24VDC 峰值功率320W | 220V/110V 50Hz-60Hz 適配至24VDC峰值功率500W | 220V/110V 50-60Hz 適配至DC48V 峰值功率 960W | 220V/110V 50-60Hz 適配至48VDC峰值功率 960W | ||
| 通訊 | Ethernet | |||||
| 硬急停 | / | / | 支持 | 支持 | ||
| Z軸可以定制高度 | 0.1米 ~ 0.5 米 | 0.1米 ~ 1米 | 0.1米 ~ 1米 | 0.1米 ~ 1米 | ||
| Z軸拖動示教 | / | / | / | / | ||
| 電器預留接口 | / | 標配: 插座面板直通下蓋板2根4*23awg(無屏蔽層)線; 可選配: 插座面板直通法蘭2根?4 氣管 | 標配: 插座面板直通下蓋板2根4*23awg(無屏蔽層)線; 可選配: 插座面板直通法蘭2根?4 氣管 | 標配:插座面板直通小臂下蓋板2根 4*23awg (無屏蔽層)線; 可選配: 插座面板直通法蘭2根φ4氣管 | ||
| 適配 HITBOT 電動夾爪 | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-30/Z-EFG-50, 第五軸,3D打印 | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100, 第五軸,3D打印 | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100, 第五軸,3D打印 | ||
| 第二臂體運動范圍 | 標配: ±143° | 標配: ± 164°; 選配: 15deg-345deg | 標配: ± 164°; 選配: 15deg-345deg | / | ||
| 使用環境 | 環境溫度: 0-55℃ 濕度: RH85 (不結霜) | |||||
| V/O 口 | 數字輸入(隔離) | 9 + 3 | 9+3+小臂擴展 (8進8出;夾爪專用端口: 脈沖或485) | 9+3+小臂擴展 (8進8出;夾爪專用端口: 脈沖或485) | ≤14 | |
| 數字輸出(隔離) | 9 + 3 | 9+3+小臂擴展 (8進8出;夾爪專用端口: 脈沖或485) | 9+3+小臂擴展 (8進8出;夾爪專用端口: 脈沖或485) | ≤22 | ||
| 模擬量輸入(4-20mA) | / | / | / | ≤6 | ||
| 模擬量輸出(4-20mA) | / | / | / | 0 | ||
| 整機高度 | 500mm | 596mm | 830mm | 400mm | ||
| 主機重量 | 180mm行程裸機重量約11kg | 240mm行程裸機重量約19kg | 410mm行程裸機重量約28kg | 410mm行程裸機重量約28kg | ||
| 底座安裝尺寸 | 底座外形尺寸 | 200mm*200mm*10mm | 200mm*200mm*10mm | 250mm*250mm*15mm | 250mm*250mm*15mm | |
| 底座固定孔位間距 | 160mm*160mm 配四個 M5*12 螺絲 | 160mm*160mm 配四個 M8*20 螺絲 | 200mm*200 配四個M8*20 螺絲 | 200mm*200 配四個M8*20螺絲 | ||
| 碰撞檢測 | √ | √ | / | / | ||
| 拖動示教 | √ | √ | / | / | ||
| 底盤兼容性 | 與 Z-Arm 1632 底盤完全兼容 | / | 與Z-Arm ZZ60底盤完全兼容 | / | ||
| 法蘭盤兼容性 | 與 Z-Arm 1632 法蘭兼容 | 與 Z-Arm 2140 法蘭盤兼容 | 與Z-Arm XX42 法蘭盤兼容 | 與Z-Arm XX42法蘭兼容 | ||
| 調試/在線升級(USB口) | √ | √ | √ | √ | ||
| 備注:由于產品不斷推新迭代,產品參數如有變更,恕不另行通知 | ||||||
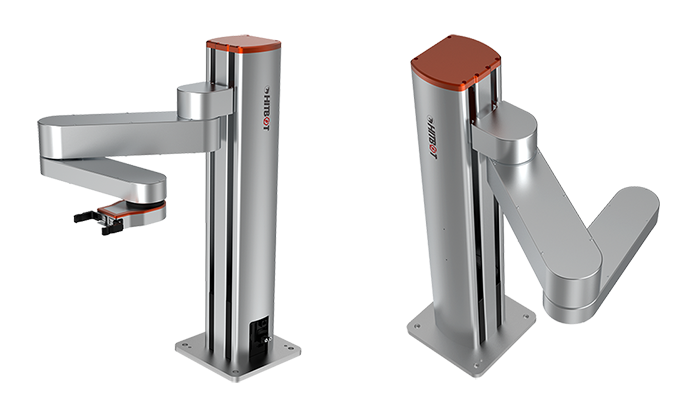
| 產品圖片 | |
|
||
| 四軸協作機械臂 | Z-Arm XX32 | Z-Arm XX42 | ||
| 基本信息 | 1 軸 | 臂長 | 160mm | 220mm |
| 旋轉角度 | ± 90° | ± 90° | ||
| 2 軸 | 臂長 | 160mm | 200mm | |
| 旋轉角度 | ± 143° | ± 164° | ||
| Z 軸 | 行程 | 180mm (高度可定制) | 240mm (高度可定制) | |
| R 軸 | 旋轉范圍 | ± 1080° | ± 1080° | |
| 線速度 | 1017mm/s (負載 0.5kg) | 1220mm/s (負載2kg); 1023.79mm/s (負載 2kg); | ||
| 重復定位精度 | ± 0.02mm | ± 0.03mm | ||
| 標準負載 | 0.5kg | 2kg | ||
| 最大負載 | 1kg | 3kg | ||
| 自由度 | 4 | 4 | ||
| 電源 | 220V/110V 50-60Hz 適配至24VDC 峰值功率320W | 220V/110V 50Hz-60Hz 適配至24VDC峰值功率500W | ||
| 通訊 | Ethernet | Ethernet | ||
| 硬急停 | / | / | ||
| Z軸可以定制高度 | 0.1米 ~ 0.5 米 | 0.1米 ~ 1米 | ||
| Z軸拖動示教 | / | / | ||
| 電器預留接口 | / | 標配: 插座面板直通下蓋板2根4*23awg(無屏蔽層)線; 可選配: 插座面板直通法蘭2根?4 氣管 | ||
| 適配 HITBOT 電動夾爪 | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-30/Z-EFG-50, 第五軸, 3D打印 | ||
| 第二臂體運動范圍 | 標配: ±143° | 標配: ± 164°; 選配: 15deg-345deg | ||
| 使用環境 | 環境溫度:0~45℃, 相對溫度: 20-80RH(不結霜) | 環境溫度:0~45℃, 相對溫度: 20-80RH(不結霜) | ||
| V/O 口 | 數字輸入(隔離) | 9 + 3 | 9+3+小臂擴展(8進8出;夾爪專用端口:脈沖或485) | |
| 數字輸出(隔離) | 9 + 3 | 9+3+小臂擴展(8進8出;夾爪專用端口:脈沖或485) | ||
| 模擬量輸入(4-20mA) | / | / | ||
| 模擬量輸出(4-20mA) | / | / | ||
| 整機高度 | 500mm | 596mm | ||
| 主機重量 | 180mm行程裸機重量約11kg | 240mm行程裸機重量約19kg | ||
| 底座安裝尺寸 | 底座外形尺寸 | 200*200*10mm | 200*200*10mm | |
| 底座固定孔位間距 | 160*160mm 配四個 M5*12 螺絲 | 160*160mm 配四個 M8*20 螺絲 | ||
| 碰撞檢測 | √ | √ | ||
| 拖動示教 | √ | √ | ||
| 底盤兼容性 | 與 Z-Arm 1632 底盤完全兼容 | / | ||
| 法蘭盤兼容性 | 與 Z-Arm 1632 法蘭兼容 | 與 Z-Arm 2140 法蘭盤兼容 | ||
| 調試/在線升級(USB口) | √ | √ | ||
| 備注:由于產品不斷推新迭代,產品參數如有變更,恕不另行通知 | ||||
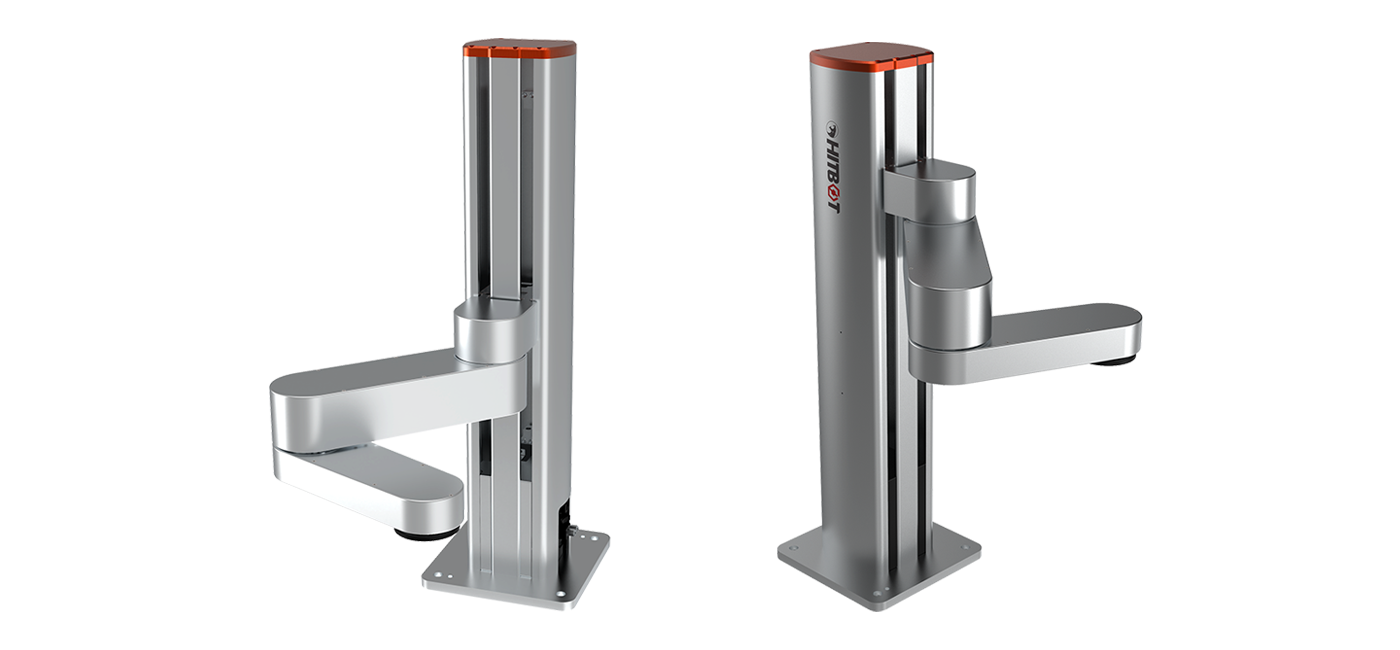
| 產品圖片 | |
|
||
| 四軸協作機械臂 | Z-Arm XX60 | Z-Arm XX50 | ||
| 基本信息 | 1 軸 | 臂長 | 325mm | 275mm |
| 旋轉角度 | ± 90° | ± 90° | ||
| 2 軸 | 臂長 | 275mm | 225mm | |
| 旋轉角度 | ± 164° | ± 164° | ||
| Z 軸 | 行程 | 410mm (高度可定制) | 410mm(高度可定制) | |
| R 軸 | 旋轉范圍 | ±1080° 無機械限位/ ±170° 有機械限位 | ±1080° 無機械限位 / ±170° 有機械限位 | |
| 線速度 | 1500mm/s (負載 3Kg) | 1400mm/s (負載4kg) | ||
| 重復定位精度 | ± 0.05mm | ± 0.05mm | ||
| 標準負載 | 3kg | 4kg | ||
| 最大負載 | 3.5kg | 5kg | ||
| 自由度 | 4 | 4 | ||
| 電源 | 220V/110V 50-60Hz 適配至DC48V 峰值功率 960W | 220V/110V 50-60Hz 適配到DC48V 峰值功率960W | ||
| 通訊 | Ethernet | Ethernet | ||
| 硬急停 | 支持 | 支持 | ||
| Z軸可以定制高度 | 0.1米 ~ 1米 | 0.1米 ~ 1米 | ||
| Z軸拖動示教 | / | / | ||
| 電器預留接口 | 標配: 插座面板直通下蓋板2根4*23awg(無屏蔽層)線; 可選配: 插座面板直通法蘭2根?4 氣管 | 標配: 插座面板直通下蓋板2根4*23awg(無屏蔽層)線; 可選配: 插座面板直通法蘭2根?4 氣管 | ||
| 適配 HITBOT 電動夾爪 | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100, 第五軸,3D打印 | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100, 第五軸,3D打印 | ||
| 第二臂體運動范圍 | 標配: ± 164°; 選配: 15deg-345deg | 標配: ± 164°; 選配: 15deg-345deg | ||
| 使用環境 | 環境溫度:0-45℃,相對濕度:20-80RH(不結霜) | 環境溫度:0-45℃,相對濕度:20-80RH(不結霜) | ||
| V/O 口 | 數字輸入(隔離) | 9+3+小臂擴展(8進8出;夾爪專用端口:脈沖或485) | 9+3+小臂擴展(8進8出;夾爪專用端口:脈沖或485) | |
| 數字輸出(隔離) | 9+3+小臂擴展(8進8出;夾爪專用端口:脈沖或485) | 9+3+小臂擴展(8進8出;夾爪專用端口:脈沖或485) | ||
| 模擬量輸入(4-20mA) | / | / | ||
| 模擬量輸出(4-20mA) | / | / | ||
| 整機高度 | 830mm | 830mm | ||
| 主機重量 | 410mm行程裸機重量28.5KG | 410mm行程裸機重量28KG | ||
| 底座安裝尺寸 | 底座外形尺寸 | 250*250*15mm | 250*250*15mm | |
| 底座固定孔位間距 | 200mm*200 配四個M8*20 螺絲 | 200mm*200 配四個M8*20 螺絲 | ||
| 碰撞檢測 | / | / | ||
| 拖動示教 | / | / | ||
| 底盤兼容性 | 與Z-Arm XX60底盤完全兼容 | / | ||
| 法蘭盤兼容性 | 與Z-Arm XX42 法蘭盤兼容 | 與Z-Arm XX42 法蘭盤兼容 | ||
| 調試/在線升級(USB口) | √ | √ | ||
| 備注:由于產品不斷推新迭代,產品參數如有變更,恕不另行通知 | ||||
| 產品圖片 | 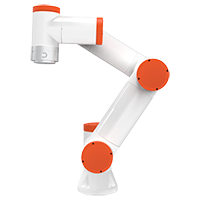 |
 |
 |
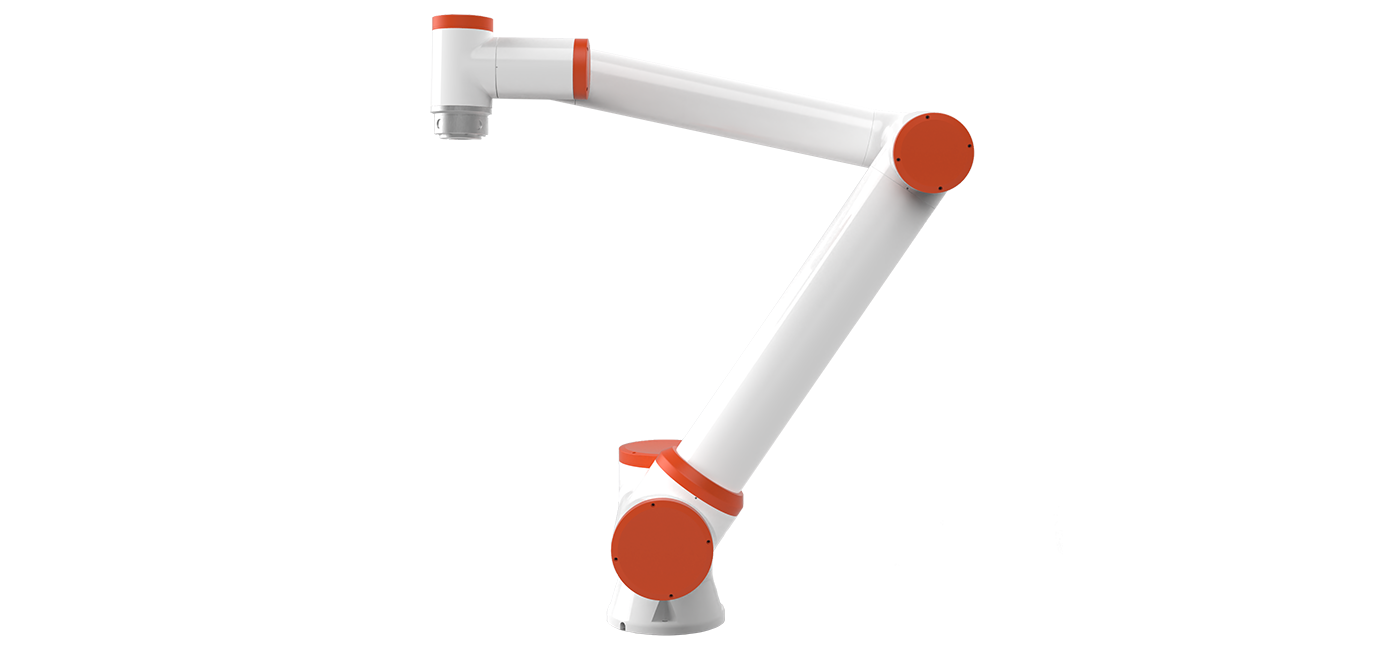
| 六軸協作機械臂 | Z-Arm S622 | Z-Arm S922 | Z-Arm S1400 |
| 重量 | 15KG | ≈22KG | ≈40KG |
| 有效負載 | 3KG | 5KG | 10KG |
| 工作范圍 | 622mm | 922mm | 1400mm |
| 安裝面積 | φ130mm | φ150mm | φ190mm |
| 關節活動范圍 軟件限位極限 | 1 軸: ±175°; 2 軸: +85°, -265°; 3 軸: ±150°; 4 軸: + 85°, -265°; 5軸: ±175°; 6軸: ±175°. | 1 軸: ±175°; 2 軸: +85°, -265°; 3 軸: ±160°; 4 軸: +85°, -265°; 5軸: ±175°; 6軸: ±175°. | |
| 重復定位精度 | ±0.02mm | ||
| 關節最大速度 | 180°/s | ||
| 控制箱尺寸 | 342*260*90mm (不含凸起物) | ||
| 自由度 | 6 | ||
| 控制箱 I/O 端口 | 數字輸入: 16; 數字輸出: 16; 模擬輸入:? ? ? 2; 模擬輸出: 2. | ||
| 末端 I/O 端口 | 模擬輸入: 1;? 模擬輸出:1 數字輸入:2;? 數字輸出: 2 | ||
| 防護等級 | IP54 | ||
| 噪聲 | <65DB | ||
| 通訊 | Ethernet, TCP/IP, 485 通信 | ||
| I/O 電源 | 24 / 1.5A | ||
| 協調操作 | 具有碰撞檢測功能,允許自定義碰撞等級 | ||
| 供電 | 220V / 50Hz | ||
| 使用環境 | ①遠離腐蝕性氣體、液體及爆炸性氣體 ②避免設備在電流的不穩定條件下工作 ③遠離振動,且振動強度不高于0.5G ④避免塵土、煙霧及水 | ||
| 溫度 | 0~45℃ | ||
| 濕度 | 20-80RH (不結露) | ||